
Arvame, et peamiste “cräshide” ehk drooni alla kukkumiste põhjuseid, tuleks siiski otsida lennutajast endast – selgus kui paari aasta vältel analüüsida erinevate droonide nn “musta kasti” sisu, OSD´st loodud nn lennulogist. Loetleme siinkohal punktidena peamised asjaolud, millest tingituna on droonid alla kukkunud. Samuti on meil hetkel välja töötamisel ja varsti jagamiseks nn “pre-flight check list” ehk lennueelse kontrolli list, mida drooniomanik peaks enne igat lennusooritamist teostama, aga praegu nendest va peamistest põhjustest. Soovime, sellega, et iga oma lennu läbi mõtleksite ja analüüsiksite, mida võiksid veel teada ja lisaks kontrollida?
Propellerid tulevad lahti – Püüa alati enne ja igat järgmist lendu veenduda, et propellerid on jäigalt kinni mootorite küljes ja ei loksuks. Paljudel juhtudel on propelleritest põhjustatud crashid tingitud just “ise lukustuvate” propelleritega. Kui propeller ei ole korralikult end ära lukustanud, siis kiiretel pööretel võib propeller lihtsalt minema lennata ja quadidel on siis üsna “kesine” kolme propelleriga õhus püsida kui suurematel mitmikkopteritel nagu heksa- ja oktokopteritel.
Halb keskkond – See on üks sagedasemaid põhjuseid, miks droonid alla kukuvad. Miks? Sest need kaotavad tihtipeale juhitavuse-/kontrolli piloodi poolt. Halbade keskkondade all peame silmas järgnevaid kohti, kus tasuks vältida lennutamist: kõrgepinge-ja elektriliinide lähedus, kõrgete hoonete kohal ja läheduses, mobiili- ja televisioonimastide läheduses, teiste tugevamate signaalide allikate läheduses või kõikide asjade läheduses, mis mõjutab elektromagneetilist välja. Püüa valida lennutamiseks avatud õhuruumiga koht – ja kaugemal ülal loetletutest paikadest.
Silmsidedrooniga puudub – Drooni lennutamine kui puudub drooniga silmside, on alati ohtlik. Seda just seetõttu, et sa ei taju mis võib olla drooni läheduses kui ise ainult droonilt tulevat videot näed. Ainult nähtava video kaudu, võid kõrguse muutumist kehvasti tajuda. Kehvema poolse videokvaliteedi tõttu ei pruugi sa näha ees olevaid elektriliine jne. Seetõttu võid üsna kergesti millegiga kokku põrgata.
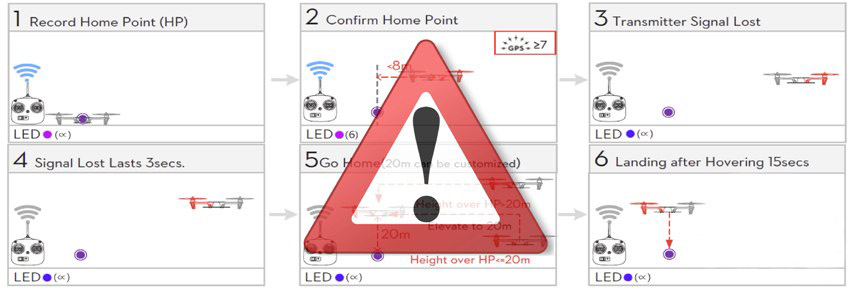
Käsklus “Tule koju” – Paljudel tänapäeva droonidel on nupp “Tule koju” ehk (RTH), mis seejärel varem GPS´st saadud info põhjal salvestatud koordinaatidele kopteri koju toob. Aga seejuures ei ole paljud arvestanud sellega, et milliste seadete põhjal droon seda tegema peaks. Ehk, et kui oled filminud-/ pildistanud näiteks midagi ja siis andnud käskluse “tule koju” droonile, võib ta vastavalt sinu varem määratud (tavapärastele) seadetele tõusta 20m kõrgusele ja siis tagasi tulema hakata. Aga kui selle teekonna vahele peaks jääma mõni kõrgem ehitis või muu takistus, siis on kokkupõrge vältimatu kui ei jõua seda käsklust enne tühistada. See on üks paljusid põhjuseid, miks kopterid alla kukuvad. Alati tasub hinnata enda filmitavat objekti ja teiste hoonete (takistuste) kõrguseid, et ka ühenduse kadumisel kopter piisavalt kõrgele läheks, vältimaks koju naasmise teekonnal mõnd kõrgemat puud või hoonet. Seda saad lihtsasti seadetest muuta.
Drooni “enekad” (selfie´d) – See on see jah kui filmitakse ennast ja lennutatakse drooni tagurpidi. Paljudele meeldib selliseid võtteid teha, aga unustatakse jälgida drooni ennast ja selle ümbrust ning jälgitakse ainult maapealset videot. Nii on väga lihtne oma droon kiiresti ära lõhkuda, kuna ei jälgita seda, mis on drooni taga? Kauguse hindamine on samuti kehvemapoolsem kui tegemist on väikese asjaga millegi suhtes. See on sama nagu proovida filmida diagonaalis näiteks mõnda kaugemal olevat puud või hoonet ilma droonilt saadava videota, siis on sul pidevalt selline tunne, et droon on puule või hoonele liialt lähedal.
Akud ja nende vale jälgimine – Võib öelda, et 90% drooni kukkumiste põhjuseid leiab akude valest või oskamatust kasutusest. On levinud teadmine, et ära alusta lennutamist kui aku pole 100% täis. See on valdavalt õige, aga see sõltub ka alati sellest kui palju droon voolu tarbib. Osade kergemate droonide puhul võib alustada lendu ka 80% laetuse puhul kuid siiski peaksid teadma, et su droon tarbib õhkutõusudel enam voolu kui lihtsalt lennutades või hõljutades. Jahedama ilmaolu puhul, aku ressurss väheneb oluliselt ning siis tuleb aku laetuse taset jälgida tavapärasest tähelepanelikumalt. Iga lennuvahend ja selle aku on erinev ja ma ei hakka siinkohal välja tooma, millise laetuse taseme juures kindlasti drooni maandama peaksid, aga see soovitus võib olla drooni kasutusjuhendis samuti olemas. Samas erinevates ilmastikutingimustes ja aku vanuse kohalt on see muutuva väärtusega. Akude laadimisest ja kasutamisest, saad ka rohkem teada meie poolt pakutavatel koolitustel.
Pidurdusteekonna vale hindamine – Jälitades mõnd autot, mootorratast või ratturit lennutades ise samal ajal drooni täiskiirusel võib juhtuda nii, et märkad mõnd takistust liiga hilja, et hoog maha pidurdada. Sama on autoga, et kui mõni sekund hiljem märkad pidurdada siis see pidurdusteekond pikeneb ja kui ees on mõni takistus siis tulemuseks on…
Drooni LED märguandetulede tõlgendamatus – Igal tänapäeva droonil on LED tuled nende sabaosadel või mõne välise detaili küljes. Ei, need ei ole need navigatsiooni omad, mis mootorite või nn käppade küljes vaid need, mis on märguanneteks mõeldud ja vilguvad. See üks LED, mis suudab erivärviliselt vilkuda. DJI droonide puhul on kasutusjuhendis kõik tähendused kenasti kirjas, et mis midagi tähendab, aga tihtipeale kas ei olda piisavalt süvenetud märguandetulede tähendustesse või lihtsalt ei teata, millest süsteem parasjagu teavitab. Soovitame kõigile siinkohal leida üles see osa oma drooni kasutusjuhendist ja printida see ühele lehele, et lennutama minnes see drooniga kaasas oleks. Siis on sul see kohe käepärast võtta ja saad vaadata, kas drooni arvates on kõik parasjagu hästi (normal) või hakkab aku tühjenema või soovib, et sa kompassi uuesti kalibreeriksid.
Lennutamine siseruumides – Siseruumides abivahend GPS ei saa satelliitidega ühendust ja droon suudab siis kas ultraheli põhiselt (kui on olemas) või baromeetriga enda positsiooni või kõrgust hoida. Mistõttu, hakkab kopter nn “driftima” ehk ujuma. See on tavaline “ATTI” režiim näiteks DJI toodangu puhul, millega tasuks siis oluliselt ettevaatlikum olla. Kui sa enne pole siseruumis lennutanud, saad selles ATTI reziimis lendama õppida ka mõnel avatud lennuplatsil. Näiteks paljud oma ala professionaalid lennutavadki ainult selles reziimis, kuna lennutamine on palju sujuvam ning kopter nagu liugleks oma õhupadja peal. Samuti ei mõjuta ATTI režiimis drooni lennutamist kõrgema indeksiga magnetväljade häirituse tase (vt, lehe all osas diagrammi), mis vastupidiselt GPS režiimis lennutamisel mõjutaks.
Kokkuvõttes, on meil palju häid ja vanu mudeliste, kes on osanud lennutada ilma cräshideta oma droone muretult juba aastaid. Loomulikult on selle tulemuseks teadmised ja kogemused. Isiklikult, pole (veel õnneks) olnud ühtegi kräshi, mis oleks õhus olnud drooni alla toonud – võib olla on see õnn, ei oska öelda. Samas eksimine on inimlik, aga kui teada rohkem ja mängida oma lennuplatsil need niiöelda võimalike kukkumiste variandid ennetavalt läbi, siis usun, et cräshid jäävad ära. Kuigi minu artiklis oli tegemist siiski peamiste ja levinumate cräshimiste põhjustega, siis tasub teada oluliselt rohkem. Meil on tänapäeva droonidel palju erinevaid lennurežiime – kõiki erinevaid ja eraldi välja tuua ning soovitusi jagada siin ei jõuaks, seepärast on kasulik lugeda läbi oma drooni kasutusjuhend või läbida meie droonikoolitus oma drooniga.
Ohutut lennutamist soovib,
Henry Tombak
juhatuse liige-/CEO








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}